Get ready to celebrate! On Aug. 5, NASA’s Curiosity rover will mark its 11th year on Mars by doing what it does best: studying the Red Planet’s surface. Recently, the intrepid bot ventured to a location called “Jau” that is filled with numerous impact craters. This is a rare opportunity for scientists to get an up-close view of so many Martian craters in one place. Some of these craters are as big as a basketball court, while others are smaller.
Jau is a pit stop on the rover’s journey into the foothills of Mount Sharp, a towering 3-mile-high mountain that was once covered in lakes, rivers, and streams billions of years ago. Each layer of the mountain represents a different era in Mars’s ancient climate, and as Curiosity climbs higher, scientists gain valuable insights into how the landscape has changed over time.
The path up the mountain has been the most challenging climb for Curiosity so far. It has faced steep inclines, slippery sand, and rocks the size of its wheels. This trifecta of obstacles has tested the rover’s capabilities, leading to several difficult drives in May and June. But despite the challenges, Curiosity’s drivers back on Earth remain determined.
“If you’ve ever tried running up a sand dune on a beach—and that’s essentially what we were doing—you know it’s hard, but there were boulders in there as well,” said Amy Hale, a Curiosity rover driver at NASA’s Jet Propulsion Laboratory in Southern California.
How to drive a rover
Amy Hale is one of the brilliant minds behind Curiosity’s mobility system and robotic arm. She is part of a team of rover planners who write code to command the rover’s movements and activities. These engineers work closely with scientists to determine the rover’s path, capture images, and study targets using its robotic arm.
But rover planners also have the important task of identifying potential hazards. They must navigate around rocks and ensure the rover’s wheels are protected. Geologists on the team use their expertise to detect deep sand and unstable rock formations. There is even a role dedicated to assessing potential communication obstacles with Earth.
Six-wheeled ascent
During the climb to Jau, Curiosity faced some challenges, but the team always prioritizes the rover’s safety. The planners write commands to prevent any damage and stop the rover if unexpected situations arise. However, there were instances where the wheels slipped or encountered large rocks, causing temporary stoppages.
“We were basically playing fault bingo,” said Dane Schoelen, Curiosity’s strategic route planning lead at JPL. “Each day when we came in, we’d find out we faulted for one reason or another.”
To overcome these obstacles, Schoelen and his colleagues devised a detour that led Curiosity to a more manageable incline. Although the detour added a few weeks to the journey, it proved to be a successful decision.
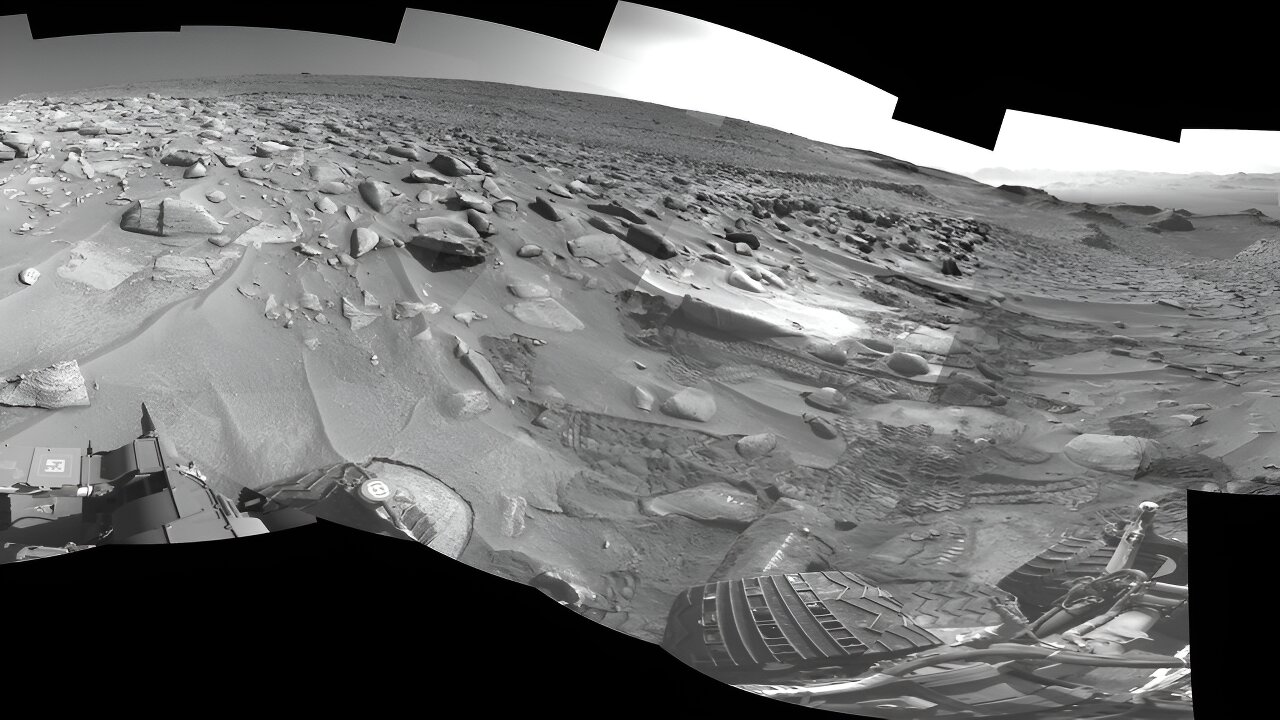
“It felt great to finally get over the ridge and see that amazing vista,” Schoelen said. “I get to look at images of Mars all day long, so I really get a sense of the landscape. I often feel like I’m standing right there next to Curiosity, looking back at how far it has climbed.”
After the challenging ascent, Curiosity’s scientists completed their investigation of the Jau crater cluster. These clusters form when meteors break up in Mars’s atmosphere or when fragments are thrown by larger meteoroid impacts. Scientists are eager to understand how the soft rocks in the salt-enriched terrain influenced the formation and evolution of these craters.
Despite the obstacles, Curiosity is not slowing down. It will soon embark on a new exploration in a higher area of Mount Sharp.